کوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهکوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهدانلود پاورپوینت بررسی ضوابط و اصول طراحی پارکینگها
اختصاصی از کوشا فایل دانلود پاورپوینت بررسی ضوابط و اصول طراحی پارکینگها دانلود با لینک مستقیم و پرسرعت .

این پروژه به طور اختصاصی در مجموعه تیردار تهیه و تنظیم شده است.
پروژه مورد نظر در قالب یک پاورپوینت قابل ویرایش در 62 اسلاید آماده شده است.
فهرست کلی:
- تعریف پارکینگ ............................................................. 4
- تعریف و تبیین اصطلاحات مربوط به پارکینگ ....................... 5
- انواع پارکینگ از نظر اندازه .............................................. 6
- انواع پارکینگ ............................................................... 7
- عوامل مورد توجه در طراحی پارکینگ .............................. 15
- استانداردها و الزامات طراحی پارکینگ ............................ 27
- منابع ........................................................................ 63
توضیح مختصر:
پارکینگ اختصاصی: محلی است که مالکین ساختمانها در ساختمان خود برای پارک وسایط نقلیه پیشبینی مینمایند.
پارکینگ عمومی: محلی است که افراد در موقع مراجعه به نقاط مختلف شهر، از قبیل مراکز حوزه شهری خدماتی و مناطق، نواحی و محلات شهر بتوانند اتومبیل خود را در آن متوقف کنند. 

پارکینگ مزاحم: محل توقف خودرویی که از آن برای عبور خودروی دیگر حقوق ارتفاقی تعریف شده باشد.
حذف پارکینگ: آن تعداد پارکینگ که برخلاف پروانه، تأمین نشده باشد، حذف پارکینگ نام دارد. مثلاً به علت ستون گذاری غلط، پارکینگ تأمین نمیشود، لذا حذف پارکینگ به وجود میآید. یا ارتفاع نامناسب برای ورودی پارکینگ که اتومبیلها «سر گیر» میشوند و به سقف گیر میکنند و نمیتوانند وارد ساختمان شوند و لذا بدین ترتیب پارکینگ حذف شده است. 
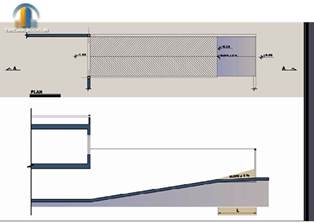
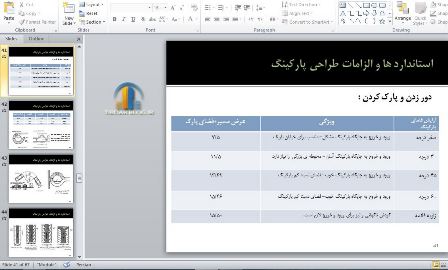
ورودی و شیب راهه در پارکینگ ها :
عرض مفید درب ورودی (پشت تا پشت چهار چوب درب) ، معبر ورودی و شیب راهه در پارکینگ های بزرگ حداقل شش متر( تصویر 2) و در پارکینگ های متوسط و کوچک حداقل سه مترمی باشد . (تصویر3)
در صورت طراحی پارکینگ بیش از سه اتومبیل در یک دهانه ، به ازاء هر عدد محل توقف اضافی خودرو 2.30 متر (دو متر و سی سانتی متر ) به دهانه ردیف مربوطه افزوده می گردد.
در شرایطی که یک اتومبیل در مجاور اتومبیل دیگر بنا به ضرورت طراحی جلوتر توقف نموده است ، ضمن رعایت دهانه استاندارد توقف دو اتومبیل ، قسمت مجاور عارضه فیزیکی برای اتومبیل جلوتر معادل دهانه مفید توقف یک اتومبیل می باشد.
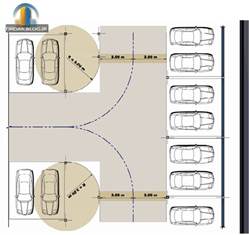
دهانه استاندارد جهت پارک یک خودرو – A
دهانه استاندارد جهت پارک دو خودرو - B
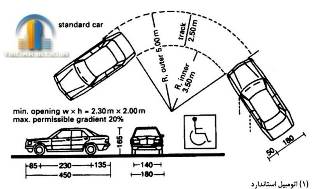
محل توقف اتومبیل افراد معلول می باید در نزدیکترین فاصله به درهای ورودی خروجی و آسانسور پارکینگ باشد و بوسیله علامت مخصوص مشخص شود.
محل توقف اتومبیل افراد معلول در هر سمت نباید بیش از 2% شیب داشته باشد.
-در پارکینگ های عمومی باید دو درصد ( 2%)از فضاهای توقف (حداقل یک فضای توقف در هرشرایط)برای افراد معلول در نزدیک ترین فاصله به ورودی و خروجی پیاده اختصاص یابد.
در ساختمانهای مسکونی با ظرفیت ده واحد به بالا دسترسی معلولین جسمی –حرکتی در تراز پارکینگ به پیش فضای آسانسور ضروری است.
حداقل عرض محل توقف اتومبیل افراد معلول 3.5 مترمی باشد.
و ...
تصاویر صفحه پاورپوینت:

ـــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ
بررسی استاندارهای پارکینگها,اطلاعات کامل پارکینگها,ضوابط و معیارهای طراحی پارکینگها,طراحی پارکینگ
دانلود پاورپوینت ضوابط و استانداردها و اصول ساخت استخر
اختصاصی از کوشا فایل دانلود پاورپوینت ضوابط و استانداردها و اصول ساخت استخر دانلود با لینک مستقیم و پرسرعت .

این پروژه به طور اختصاصی در گروه تیردار تهیه و تنظیم شده است.
پروژه مورد نظر در یک پاورپوینت کامل در 72 اسلاید گردآوری شده است.
فهرست:
- انواع استخر و امکانات و تجهیزات آنها ............................................. 4
- تأسیسات و تجهیزات استخر شنا (فضاهای جنبی) ......................... 14
- تأسیسات عمومی استخر .......................................................... 20
- اصول کلی در ساخت استخر ....................................................... 22
- مراحل اجرای استخر .................................................................. 25
- تأسیسات ............................................................................... 35
- دستگاه کلر زنی - کلریناتورchlorinator -دوزینگ پمپ ....................... 37
- اجزای پمپ کلرزنی ................................................................... 40
- اجزای استخر ........................................................................... 42
- انواع مختلف استخر و آب نما داخل زمین ....................................... 44
- استخر های بتنی ...................................................................... 47
- حالات کلی برای ساخت ............................................................. 48
- انواع ساخت و ساز استخرها ....................................................... 49
- استاندارد ها ............................................................................. 65

توضیحات:
انواع استخر و امکانات و تجهیزات آنها
1- استخر آموزشی: معمولاً در ابعاد 8×8 و یا 8×10 متر طوری طراحی و ساخته می شود که الگوهای آموزشی و یا ابزارهای کمک آموزشی در آن مد نظر باشد، مثلاً عمق آن حداکثر به یک متر و بیست سانتیمتر و به صورت شیب دار به نحوی ساخته که لااقل یک ضلع استخر علاوه بر کم عمق بودن قسمتی از آن به صورت پلکان وارد استخر شده تا برای آن دسته از اشخاصی که از وارد شدن ناگهانی در آب وحشت دارند مناسب باشد. میله هایی استیل در اطراف دیواره ها و در قسمت سطح آب نصب شده که حدود 10 سانتیمتر با دیواره فاصله دارند که برای غوطه ور شدن و آموزش دست و پا بسیار مورد استفاده قرار می گیرد، عمق آب اینگونه استخرها قابل تنظیم است. جدای از میله استخرهای آموزشی لوازم کمک آموزشی نظیر: تخته شنا به ابعاد مختلف - دوقلوی شنا - حلقه لاستیکی - کمربند نجات - بازوبند نجات - دماغ گیر - گوشی پای دولفینی (قورباغه) - و....که هر کدام موارد خاص خودش را دارد، برای افراد مختلف مورد استفاده قرار می گیرد .عمق آب اینگونه استخرها قابل تنظیم است.

2- استخرهای تفریحی: در چنین استخرهایی بخش بزرگی از سطح آب (تا 80 درصد) کمتر از 7/1 متر عمق دارد ناحیه عمیق در این نوع استخرها مناسب نصب تخته های شیرجه کوتاه (حداکثر تا یک متر) و نصب وسایل بازی مانند انواع سٌرسٌره، نصب موج افکن های مکانیکی و ورزش غواصی می باشد. کف استخرهای تفریحی باید دارای شیب ملایم باشد و از 7 درصد تجاوز نکند.

3- استخرهای قهرمانی: طول اینگونه استخرها 33/33 متر - 25 متر – 50 متر و عرض آن 10-21 متر متغیر است و عمق آن کمتر از 1/80 متر نیست اینگونه استخرها به دو صورت روباز یا سر پوشیده مورد بهره برداری قرار می گیرد.در استخرهای سرپوشیده معمولاً از آب گرم استفاده می شود، ولی در استخرهای رو باز اکثر از آب سرد طبیعی بهره می گیرد. تعداد خطوط شنا (لاین) بسته به عرض استخر بین 6تا8 خط متغیر است، این خطوط به وسیله طنابی که دو سر آن با قلابهایی به دیواره استخر وصل است در طول استخر کشیده می شود روی طناب اجسام غوطه ور دو انتهای طناب با رنگ سایر قسمتها متفاوت است. عرض هر خط شنا باید 5/2 متر باشد. قطر این شناورها ممکن است از 5 تا 15 سانتیمتر باشد در بین هر دو خط نباید بیش از یک رشته طناب وجود داشته باشد. در حورد خطوط کف استخر؛ باید از رنگ تیره بوده و درست در مرکز یا وسط هرخط استخر کشیده شده باشد. و ادامه ....
و ادامه .....
تصویری از پاورپوینت:

ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ
پاورپوینت اصول طراحی و ساخت استخر,پاورپوینت بررسی کامل تأسیسات و اصول ساخت استخر,بررسی انواع استخر و اصول و امکانات و تجهیزات آنها-پاورپوینت اصول طراحی و ساخت استخر-پاورپوینت کامل تأسیسات و اصول ساخت استخر- ppt اصول ساخت استخر-پروژه کامل تأسیسات و اصول ساخت استخر-پروژه آماده تأسیسات و اصول ساخت استخر-بررسی تأسیسات و اصول ساخت استخر-تجزیه و تحلیل تأسیسات و اصول ساخت استخر-انواع مختلف استخر و آب نما-استانداردها و ضوابط طراحی و ساخت استخر-پاورپوینت کامل استانداردها و ضوابط ساخت استخرها-انواع استخر, مراحل ساخت استخر, بررسی انواع استخرها-بررسی استانداردها و ضوابط ساخت استخرها
کتاب اصول نم زدایی در صنایع نفت و گاز
اختصاصی از کوشا فایل کتاب اصول نم زدایی در صنایع نفت و گاز دانلود با لینک مستقیم و پرسرعت .

نوع فایل : PDF
تعداد صفحات : 173 صفحه
چکیده :
ﻣﻮﺿﻮع ﺗﺪوﻳﻦ ﻛﺘﺎب اﺻﻮل ﻧﻢ زداﻳﻲ در ﺻﻨﺎﻳﻊ ﻧﻔﺖ وﮔﺎز ﺟﻬﺖ ﻛﺎرآﻣﻮزان و ﻛﺎرﻛﻨﺎن ﺷـﺮﻛﺖ ﻣﻠـﻲ ﮔـﺎز اﻳﺮان از آﻧﺮو اﻫﻤﻴﺖ ﭘﻴﺪا ﻣﻲ ﻧﻤﺎﻳﺪ ﻛﻪ ﺗﻤﺎﻣﻲ ﮔﺎزﻫﺎی اﺳﺘﺤﺼﺎﻟﻲ از ﻣﻴﺎدﻳﻦ ﻣﺨﺘﻠﻒ ﻛﺸﻮر، ﺟﻬﺖ اﺳﺘﻔﺎده ﺑﺎﻳﺴﺘﻲ وارد ﭘﺮوﺳﺔ ﻧﻢ زداﻳﻲ ﺷﻮﻧﺪ ، ﺗﺎ ﻛﻨﻮن ﻛﺘﺎﺑﻬﺎی ﻣﺨﺘﻠﻔﻲ در اﻳﻦ ﺧﺼﻮص ﺑﺮﺷﺘﺔ ﺗﺤﺮﻳﺮ درآﻣﺪه اﻣـﺎ ﺑﻄﻮر ﺟﺪا و ﻣﺴﺘﻘﻞ ﺑﻪ ﻧﻢ زداﻳﻲ ﺑﺎ ﻣﻮاد ﻣﺎﻳﻊ و ﻳﺎ ﻣﻮاد ﺟﺎﻣﺪ ﺟﺎذب اﻟﺮﻃﻮﺑـﻪ ﭘﺮداﺧﺘـﻪ ﺷـﺪه وﻛﺘـﺎﺑﻲ ﻛـﻪ ﺑﺼﻮرت ﻋﻤﻠﻴﺎﺗﻲ، ﺟﺎﻣﻊ و ﻣﻨﻄﺒﻖ ﺑﺮ روﺷﻬﺎی ﺟﺪﻳﺪ ﻣﻮرد اﺳﺘﻔﺎده در ﭘﺎﻻﻳﺸﮕﺎﻫﻬﺎی ﮔﺎز ، ﺗﺎﻛﻨﻮن ﺑﻪ اﻣـﺮ ﻧﻢ زداﻳﻲ ﺑﺼﻮرت ﺗﺨﺼﺼﻲ ﻧﭙﺮداﺧﺘﻪ و ﺗﺪوﻳﻦ و ﺗﺎﻟﻴﻒ ﻧﺸﺪه اﺳﺖ.
فهرست مطالب :
ﻓﺼﻞ اول : ﻟﺰوم ﺟﺪاﺳﺎزی آب از ﻧﻔﺖ وﮔﺎز ﻃﺒﻴﻌﻲ
ﻓﺼﻞ دوم : اﻧﻮاع روش ﻫﺎی ﻧﻢ زداﻳﻲ از ﮔﺎز ﻃﺒﻴﻌﻲ
ﻓﺼﻞ ﺳﻮم : اﺻﻮل ﻧﻢ زداﻳﻲ از ﮔﺎز ﻃﺒﻴﻌﻲ ﺑﺎ ﻣﺎﻳﻌﺎت ﺟﺎذب اﻟﺮﻃﻮﺑﻪ
ﻓﺼﻞ ﭼﻬﺎرم : روﺷﻬﺎی ﻏﻠﺒﻪ ﺑﺮ آﻧﻬﺎ در واﺣﺪﻫﺎی ﻧﻢ زداﻳﻲ ﺑﺎ ﮔﻼﻳﻜﻮل
ﻓﺼﻞ ﭘﻨﺠﻢ : ﻧﻢ زداﻳﻲ از ﮔﺎز ﻃﺒﻴﻌﻲ ﺑﺎ ﻣﻮاد ﺟﺎﻣﺪ ﺟﺎذب اﻟﺮﻃﻮﺑﻪ
ﻓﺼﻞ ﺷﺸﻢ : اﺻﻄﻼﺣﺎت راﻳﺞ درﻧﻢ زداﻳﻲ
دانلود مقاله اصول نگهداری مواد غذایی بوسیله کنسرو کردن
اختصاصی از کوشا فایل دانلود مقاله اصول نگهداری مواد غذایی بوسیله کنسرو کردن دانلود با لینک مستقیم و پرسرعت .

انسان در حل مشکلات ناتوان است و نمی داند که چگونه زندگی کند . اختراعات نتایج ترکیب مشاهدات و تفکرات حافظه است . یک اختراع معمولا ترکیبی از چندین مورد مورد است که شناخته شده هستند ولی سازماندهی نشده اند ، بعلاوه جمع آوری یک یا چندین مورد از اطلاعات قبلی و آفرینش یک مفهوم که قبلا درک نشده است راهی بسوی یک اختراع می باشد . کنسرو سازی که امروزه آن را میشناسیم نتیجه یک حرکت دسته جمعی است .
فرانسه در اواخر دهه 1790 در جنگ بسر میبرد و مردم مشکلات زیادی در زمینه تغذیه داشتند . جنگهای ناپلئون بالاجبار یک رژیم غذایی شامل گوشت فاسد و دیگر موارد با کیفیت بسیار پایین بوجود آورده بود . غذاهای موجود نمی توانستند انبار شوند و یا حمل شوند به جز مواد غذایی خشک ، مشکل اصلی شناخته شده بود یک جایزه 12000 فرانکی تعیین شده بود برای کسی که یک روش قابل استفاده برای نگهداری مواد غذایی اختراع کند . (( نیکلاس آپرت )) یک فرانسوی قناد ساده و کوچک کار می کرد ، مشاهده کرد که غذای گرم در ظرفهای درب دار که درب آنها کاملا بسته بود و هیچ منفذی نداشت از فساد حفظ شده بود . او متواضعانه این حادثه را هنر اشتها نامید . (( آپرت )) پس از 10 سال از به ثبت رساندن اختراعش جایزه را از ناپلئن دریافت کرد .
آن اختراع باید قابل تقدبر باشد زیرا در آن موقع علت فاسد شدن غذا شناخته شده نبود . بزرگترین دانشمندان آن روزگار برای ارزیابی کار (( آپرت )) و توضیح و روشن کردن دلیل و علت موضوع اظهار شدند . عاقبت نتیجه کار رضایت بخش بود زیرا روش جادویی ترکیب غذا با هوا در یک ظرف پلمپ شده مانع فساد غذا می شد . البته کاملا نادرست بود ولی با وجود این مانع فساد
می شد . علی رغم این کنسرو کردن کشف شده بود و برای نزدیک به 50 سال با موفقیت نسبی مکررا انجام می شد . اما این در جهل و نادانی بوذد .
کنسرو سازی در سالهای 1800 تا 1850 :
ظروف شیشه ای
1 – تغلیظ :
مشخص نمودن نوع و میزان تولید یا تولیدات :
برآورد هزینه های مستقیم :
وجود منابع اولیه :
عقد قرارداد :
آب آماده :
راه سیتم حمل و نقل :
منابع انرژی :
کار و کارگر :
فاضلاب :
ماشین آلات :
این فساد در کنسروها می تواند به دلایل زیر باشد :
شامل 57 صفحه فایل word
اصول عملکرد رباتهای زیر آبی
اختصاصی از کوشا فایل اصول عملکرد رباتهای زیر آبی دانلود با لینک مستقیم و پرسرعت .

اصول عملکرد رباتهای زیر آبی
25 صفحه در قالب word
فهرست مطالب:
آشنایی با سیستمهای رباتیکی زیر دریا
وسایل زیردریایی بدون سرنشین
بازوهای رباتیکی زیرآبی
سیمولاتورهای دریایی
دینامیک و ارتعاشات سازههای دریایی
اثر متقابل ارتعاشات و نیروهای هیدرودینامیک
کاربرد ربات در دریا
تعریف ربات زیرآبی
کاربردهای رباتهای زیرآبی
کاربردهای تجاری و فراساحلی
کاربردهای نظامی
کاربردهای علمی و تحقیقاتی
موارد دیگری از کاربردهای رباتهای زیرآبی
دسته بندی انواع رباتهای زیرآبی
رباتهای زیرآبی کوچک
رباتهای زیرآبی الکتریکی با قابلیت بالا
رباتهای زیر آبی با ابعاد بزرگ و با قابلیت انجام کارهای سنگین
رباتهای زیر آبی خودکار و بدون نیاز به کابل
مبانی طراحی رباتهای زیرآبی
تعیین عمق. ربات.های زیرآبی
شگفتی حرکت زیردریایی.ها
ربات زیر آبی که شنایش را به نمایش گذاشت
آشنایی با سیستمهای رباتیکی زیر دریا
بیش از 70 درصد سطح زمین توسط آب پوشیده شده است. اقیانوسها دارای حجم وسیعی از منابع معدنی و حیاتی هستند. حجم زیاد انرژی و فضای موجود اقیانوسها نقش بسیار مهمی در فعالیتهای آینده اقتصادی – اجتماعی بشر خواهد داشت. علیرغم این وسعت و اهمیت تاکنون تلاش کمی در بکارگیری پتانسیلهای مثبت و مواجه با پتانسیلهای منفی این منبع عظیم خدادادی صورت پذیرفته است.
در دهههای گذشته استفاده از سیستمهای رباتیکی در زیر آب به دلیل برتری آنها در مقایسه با غواصی در عملیات آبهای عمیق و محیطهای خطرناک افزایش چشمگیری یافته است. از کاربردهای این سیستمها میتوان ماهیگیری، مانیتورکردن آلودگیهای زیر آبی، پاککردن زبالههای دریایی، عملیات بازبینی، تعمیر و نگهداری تجهیزات زیرآبی و ... را نام برد.
سیسمهای رباتیکی مورد مطالعه در این گروه را میتوان به سه دسته زیر تقسیم کرد:
- سیستم روباتیکی خودرویی Simulators
- Robotic Manipulators
- Robotic Vehiche
دسته اول که معمولاً زیردریاییهای بدون سرنشین هستند برای مقاصدی نظیر بازرسی تاسیسات زیرآبی، فیلمبرداری و حمل تجهیزات به کار گرفته میشوند. از این دسته از رباتها میتوان انواعUUV ، AUV ، ROV و .... را نام برد. دسته دوم از سیستمهای رباتیکی برای انجام عملیات مکانیکی خاص در منطقه عملیاتی مانند نمونهبرداری، نصب و ... بکار گرفته میشوند. همانند کاربردهای روی زمین و فضایی این سیستمها نیز به انواع Parallel Manipulators ، Serial Manipulators و Cooperating manipulators تقسیم میشوند علاوه بر دو سیستم فوق سیمولاتورها از جمله سیستمهای رباتیکی هستند که در مهندسی اقیانوس و دریاها به کار گرفته میشوند. سیمولاتور شناورهای سطحی و زیرسطحی مانند سیمولاتور کشتی و سیمولاتور زیردریایی و همچنین سیمولاتورها رباتیکی امواج ( Moving platform ) را از این دسته میتوان نام برد.
هزینههای بالای بازبینی، تعمیر و نگهداری تجهیزات و سکوها در زیرآب، عدم امکان انجام عملیاتهای زیرآبی در نقاط دور از دسترس بشر در زیرآب، ریسک بالای عملیات زیرآبی در بسیاری از مناطق دریایی، هزینههای بالای آموزش ناوبران در مناطق عملیاتی و ... مبین ضرورت بکارگیری سیستمهای رباتیکی در زیر آب است.
مباحث عمده در سیستمهای رباتیکی زیر آب عبارتند از:
- تجزیه و تحلیل دینامیک سیستمها
- هدایت و ناوبری سیستمهای خودرویی
- روشهای اندازهگیری کنترل سیستمها
- هوش مصنوعی (…, Image processing Pattern recognition )
- ارتباطات و مخابرات زیرآبی
- قدرت و قوای محرکه سیستمها
- طراحی و بهینهسازی طراحی با توجه به محدودیت انرژی
- مدیریت انرژی
فعالیتهای تحقیقاتی این بخش در سه محور عمده زیر پیشنهاد میگردد
وسایل زیردریایی بدون سرنشین ( Under water Robotic vehicles ) :
کاربرد وسیع این نوع سیستمها در امور بازرسی زیرآبی، اکتشاف و فیلمبرداری زیرآبی در سالهای اخیر موجب توسعه طیف وسیعی از این نوع وسایل گشته است. ROV ها (Remotly operated vehicles) به عنوان پرسابقهترین عضو این خانواده وسایلی هستند که از طریق یک کابل به کشتی مادر متصل بوده و از داخل کشتی کنترل میشوند. وجود کابل اتصالدهنده کشتی و ROV گرچه مشکلات انتقال سیگنال کنترل، انتقال انرژی و تخلیه سریع on.line اطلاعات جمعآوری شده توسط ROV را حل می کند لیکن خود مشکلاتی را نظیر تاثیر منفی کابل در کنترل وسیله و یا افزایش احتمال به تله افتادن وسیله را موجب میگردد. به عنوان نوع پیشرفتهتر این وسایل میتوان از AUV Autonomous) underwater vehicles) نام برد. عدم وجود کابل رابط بین کشتی حمایتکننده و AUV موجب میگردد تا AUV قدرت مانور بیشتری نسبت به ROV داشته باشد هرچند عدم وجود کابل رابط و خوداتکایی ( Autonomy ) این وسایل پیچیدگیهای علمی و فناوری زیادی از جمله مدیریت بهینه انرژی Image Processing ، Pattrn recognition و مخابرات زیرآبی را سبب میگردد. آخرین و پیشرفتهترین نسل این گونه وسایل Robofish ها هستند که با حذف پروانهها ( Propellers ) و جایگزینی آنها با نوعی نیروی پیش رانش ماهیچهای امکان ردگیری و کشف وسیله را بسیار مشکل کرده و از راندمان انرژی بالاتری نیز برخوردارند. این فناوری علاوه بر پیچیدگیهای مذکور در خصوص AUV ها از پیچیدگی ویژه تغییر سیستم سنتی پیش رانش برخوردار هستند.
زمینههای اصلی تحقیقاتی در این محور را میتوان به صورت زیر برشمرد:
- تحلیل هیدرودینامیک وسیله و سیستم پیش رانش
- تحلیل و طراحی سیستمهای کنترل و هدایت وسیله
- تحلیل اثر کابل رابط ROV بر رفتار دینامیکی و کنترل این وسایل
- مباحث هوش مصنوعی از جمله Image Processing ، Pattrn recognition
- مباحث ارتباطات زیرآبی
- سیستمهای جدید پیش رانش
بازوهای رباتیکی زیرآبی ( Underwater Robotic Manipulators ) :
هزینه گزاف و محدودیتهای شدید انجام عملیات زیرآبی توسط انسان توجیه بسیار مناسبی برای توسعه فناوری بازوهای رباتیکی زیرآبی ایجاد نموده است. این سیستمها در حال حاضر وظایفی نظیر جوشکاری در زیرآب، نصب آندهای قربانی شونده، شستشوی بدنهکشتیها، لولهگذاری بستر دریاها، همکاری در عملیات نجات زیرآبی و ... را به عهده میگیرند و با پیشرفت روزافزون این سیستمها کاربرد آنها دائماً در حال افزایش است. بازوهای رباتیکی زیرآبی نظیر نوع صنعتی و زمینی
(Earth bounded manipulators) در دو شکل سری (manipulators Serial) و موازی
(Parallel manipulators) استفاده میشوند. آنچه فناوری بازوهای رباتیکی دریایی را به طور مشخص از سیستمهای مشابه زمینی متمایز میسازد دو مشخصه عدم وجود پایه ثابت برای بازو و نیز مشکلات ناشی از محیط سخت دریا میباشد. عدم وجود پایه ثابت برای بازو موجب میگردد تا کنترل سیستم به مراتب مشکلتر از نمونههای زمینی شود. از سوی دیگر محیط سخت دریا پیچیدگیهای فناوری در ساخت این بازوها را سبب میشود. زمینههای اصلی تحقیقاتی این محور عبارتند از :
- تحلیل دینامیکی و کنترل رباتهای شناور ( Free Floating manipulators )
- تحلیل دینامیکی و کنترل رباتهای همکار با پایه ثابت
- طراحی و ساخت رباتهای دریایی (مناسب کار در محیط سخت دریا)
- طراحی و ساخت رباتهای موازی معلق به منظور انجام عملیات سنگین دریایی
- تحلیل دینامیکی و طراحی سیستمهای کنترل رباتهای شناور همکار (Cooprative free floating manipulators)
سیمولاتورهای دریایی
امروزه سیمولاتورها در صنایع مختلف کاربردهای وسیع آموزشی و طراحی پیدا کردهاند. کاهش هزینه و خطر آموزش و نیز قابلیت برنامهریزی و تکرارپذیری انجام مانورهای مختلف و نیز امکان ثبت دقیق عملکرد هنرجو از جمله مزایای سیمولاتورها در امر آموزش به شمار میروند. از سوی دیگر سیمولاتورها ابزار مناسبی برای مشابهسازی رفتار سیستم به منظور طراحی و بهینهسازی هستند. استفاده آزمایشگاهی از سیمولاتورها به منظور بازسازی شرایط حرکت امواج در دریا از دیگر کاربردهای سیمولاتورهاست. زمینههای اصلی تحقیقاتی در این محور عبارتند از :
- طراحی و ساخت سیستمهای رباتیک موازی
- مشابهسازی عددی حرکت امواج
- تحلیل دینامیکی شناورها در دریا و تعیین توابع تبدیل
- ابزار دقیق وسایل دریایی
- هدایت و ناوبری
- تحلیل دینامیک و کنترل سیستمهای رباتیکی
- مباحث هوش مصنوعی نظیر Vision ، تولید مصنوعی صوت
- معماری سیستمهای کامپیوتری همکار در زمان
دینامیک و ارتعاشات سازههای دریایی
سیستمهای چندعضوی مهار شده در دریا Tethered multi – body system :
امروزه تعداد قابل توجهی از اجسام صلب کوچک و بزرگ به صور مختلف از طریق خطوط مهار و لنگرهای متنوع در دریا مهار شدهاند. از جمله این سیستمها میتوان به انواع بویههای کوچک هواشناسی و اقیانوسشناسی، بویههای راهنما ( Marker ) ، سکوهای کوچک دریایی، سکوهای بزرگ نفتی و ... اشاره نمود. غالب این سیستمها اگر در نقاط عمیق دریاها مستقر باشند از طریق یک خط مهار ترکیبی با تعدادی بویه غوطهور در محل لنگر شدهاند. بررسی اثرات دینامیکی حرکت خط مهار و مجموعه بویههای غوطهور اهمیت بسیار زیادی در طراحی خط مهار و سیستم لنگر دارد.
ممکن است هنگام انتقال از فایل ورد به داخل سایت بعضی متون به هم بریزد یا بعضی نمادها و اشکال درج نشود ولی در فایل دانلودی همه چیز مرتب و کامل است
متن کامل را می توانید در ادامه دانلود نمائید
چون فقط تکه هایی از متن برای نمونه در این صفحه درج شده است ولی در فایل دانلودی متن کامل همراه با تمام ضمائم (پیوست ها) با فرمت ورد word که قابل ویرایش و کپی کردن می باشند موجود است