کوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهکوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهپروژه با عنوان: بررسی ربات میکروموس (MicroMouse Robot)
اختصاصی از کوشا فایل پروژه با عنوان: بررسی ربات میکروموس (MicroMouse Robot) دانلود با لینک مستقیم و پرسرعت .

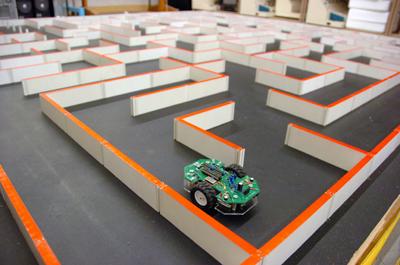
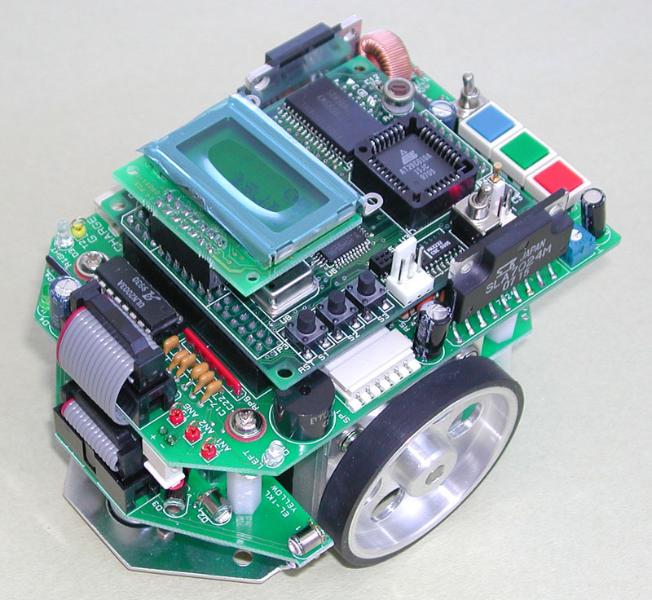
این پروژه تحت عنوان ربات میکروموس، در سه فصل تهیه شده است. فصل اول مستندات این پروژه به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده است. در فصل سوم، ساختن ربات میکروموس، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات میکروموس به طور کامل قرار داده شده است. ربات میکروموس، رباتی است که می تواند در یک مسیر بسته حرکت کرده و مسیر درست را پیدا نماید. این مسیر می تواند یک خط سیاه در زمینه سفید یا به صورت دیوار باشد. ربات باید بتواند مسیر درست را از مسیر غلط در کمترین زمان تشخیص بدهد...
پروژه بررسی ربات میکروموس (MicroMouse Robot)، مشتمل بر سه (3) فصل، 44 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
- ربات چیست؟
- تاریخچه ی پیدایش ربات
- تعاریف ربات
- علم رباتیک
- مزایا و معایب ربات ها
- قوانین سه گانه ی رباتیک
- دسته بندی ربات ها
- دسته بندی اتحادیه ربات های ژاپنی
- دسته بندی مؤسسه رباتیک آمریکا
- دسته بندی اتحادیه فرانسوی ربات های صنعتی
- انواع ربات ها
- ربات های متحرک
- طبقه بندی ربات ها
- ربات های نظامی
- کاربرد ربات ها
- ربات تعقیب خط
- ربات های حس کننده تماس
- اجزاء اصلی یک ربات
- معرفی قطعات به کار برده شده در ربات میکرو موس
- میکرو کنترلر
- چرخ هرزگرد
- برنامه ی ربات که به زبان بیسیک نوشته شده
- تاریخچه ی مسابقات میکرو موس
- آیین نامه اجرایی لیگ میکروموس
- الگوریتم های ربات میکرو موس
- الگوریتم pledge
- الگوریتم جستجوی تصادفی
- الگوریتم Bellman Flooding الگوریتم Tremaux
- چگونگی عملکرد الگوریتم بلدمن
- نمایی از یک نمونه ماز مسابقات میکروموس
جهت خرید پروژه بررسی ربات میکروموس (MicroMouse Robot) به مبلغ فقط 3000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر فروشگاه ها و محصولات آن ها مقایسه نمایید!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.
ربات مسیریاب (هفت سنسور)
اختصاصی از کوشا فایل ربات مسیریاب (هفت سنسور) دانلود با لینک مستقیم و پرسرعت .

پایان نامه ربات مسیریاب (هفت سنسور) 57 صفحه متن کامل و جامع
شما می توانید با دانلود این پایان نامه ، پایان نامه خود را به راحتی تحویل استاد دهید .
چکیده :
پروژه ی ما تحت عنوان (( ربات مسیر یاب هفت سنسور )) که در سه فصل تهیه شده است ، فصل اول مستندات این پروژه به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک ، انواع رباتها ، دسته بندی رباتها پرداخته ایم.
در فصل دوم کاربرد رباتها و همچنین اجزاء رباتها را مورد بررسی قرار داده ایم.
در فصل سوم ، ساختن ربات مسیر یاب ، شرح عملکرد ربات ، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات مسیر یاب به طور کامل قرار داده شده است .
دانلود پایان نامه ساخت و بررسی ربات تعقیب خط
اختصاصی از کوشا فایل دانلود پایان نامه ساخت و بررسی ربات تعقیب خط دانلود با لینک مستقیم و پرسرعت .

تعداد صفحات: 106
نوع فایل: PDF
قیمت: 4500 تومان
یک پایان نامه خوب در زمینه رباتها و ساخت آنها که شما را در سایر کارهای پژوهشی در این زمینه راهنمایی میکند
خلاصه:
اتوماسیون در بخشهای مختلف صنعت و کارهای تولیدی در چند دهه اخیر ظهور پیدا کرده است و روز به روز نیز در حال توسعه می باشد. بیش از چند دهه از ظهور کارخانجات کاملاً مکانیزه که در آنها تمامی پروسه ها اتوماتیک بوده و نیروی انسانی در آن نقش اجرائی ندارد، نمی گذرد. اما در چند ساله اخیر شاهد بوجود آمدن کارخانجات مکانیزه ای بوده ایم که طراحی، ساخت و نحوه کار آنها واقعاً حیرت انگیز است. ایده و دانش کنترل اتوماتیک و استفاده از سیستمهای مکانیزه در کارخانجات به جنگ جهانی دوم می رسد. ما تحولات عظیم و چشمگیر آن در سالهای اخیر بوقوع پیوسته است. ساخت روبات از موضوعات بسیار جالب و آموزنده است که مجموعه اطلاعاتی از علوم مکانیک، الکترونیک، کامپیوتر(سخت افزار و نرم افزار) و هوش مصنوعی را در قالب یک وسیله هوشمند نمود عملی می بخشد . شاید ساخت تک تک اجزایی که در یک روبات به کار می رود (مانند مدار کنترلی، برنامه نرم افزاری، ارتباط با کامپیوتر، سنسورها، عملگرها، موتورها و بدنه ) کار چندان مشکلی نباشد، اما در کنار هم قرار دادن این اجزاء، تأمین ارتباط مناسب و بهینه، جبران سازی ضعفهای یک بلوک به کمک بلوکهای دیگر و در نهایت به وجود آوردن روباتی که تا چند روز پیش چیزی جز چند قطعه و بدنه و مدار نبود و حال به صورت موجوی هوشمند به حرکت درآمده و آنچه شما است ؛ آنچه انتظار می دستور می دهید را انجام می دهد، « مهندسی کامل » رود یک دانشجوی مهندسی در هر یک رشته ای (مکانیک، برق، کامپیوتر، صنایع و… ) قادر به انجام آن باشد. مطالب این نوشته با فرض اینکه خواننده از اصول ابتدایی مدارات منطقی، میکروکنترلرها و الکترونیک آگاه است به رشته تحریر درآمده است . اما اگر هر کدام از این مطالب را نمی دانید، به جای اینکه تا وقتی که واحد درسی آن را بگیرید، به خود استراحت بدهید ! تلاش کنید و با جستجو در منابع و پرسش از آنان که می دانند راه خود را بگشایید.
فهرست :
فصل اول : رباتها ، تاریخچه و انواع آنها
فصل دوم : کاربرد رباتها و اجزاء آنها
فصل سوم : ربات تعقیب خط
فصل چهارم : سخت افزار ربات تعقیب خط
فصل پنجم : نرم افزار ربات تعقیب خط
فصل ششم : مکانیک ربات تعقیب خط
پایان نامه بازوی ربات قابل برنامه ریزی جهت بکارگیری در دستگاه های CNC
اختصاصی از کوشا فایل پایان نامه بازوی ربات قابل برنامه ریزی جهت بکارگیری در دستگاه های CNC دانلود با لینک مستقیم و پرسرعت .

پایان نامه کارشناسی رشته برق با عنوان بازوی ربات قابل برنامه ریزی جهت بکارگیری در دستگاه های CNC به صورت کامل و با دو فرمت ورد و پی دی اف
چکیده:
امروزه در دنیایی که کامپیوتر در ابعاد مختلف زندگی انسان باری را به دوش می کشد ، و ابؤاری برای سرعت ودقت کار ها محسوب می شود، همة ما می دانیم که رباتها یکی از پدیده های حیرت برانگیزخلق شده توسط انسان است و انسانها با در هم آمیختن علوم کامپیوتر ومکانیک وریاضی و...شگفتی های غیر قابل انکاری پدید آوردند .
هم اکنون در سال 2001 میلادی استفاده از رباتها در کشور های صنعتی امری مرسوم شده و بکار گیری آنها در خطوط صنعتی، اکتشافات فضایی، انجام کارهای پر خطر برای انسان، خانه ىاری وسرگرمی بوضوح دیده می شود .بطور مثال در کشور ژاپن بیش از سه ونیم میلیون ودر کشور ایالات متحده آمریکا بیش ازیک میلیون و هشتصد هزارربات در حال کار وجود دارد .این در حالی است که این معقولة مطالعاتی در کشور های توسعه نیافته یا در حال توسعه هنوز مورد توجه واقع نیست و ِا بطور شایسته به آن پرداخته نشده و عقب ماندگی زیادی در این مورد وموارد مشابه حس می گردد.بطوریکه منابع اطلاعاتی این صنعت در کشور ما بسیار محدود است، و معمولاًَ دنانده شرکت یا سازمانی در این مورد گامی هم برداشته باشد، از انتشار ودر اختیار گذاشتن آن برای استفادة دیگران به شدت خودداری می ورزد بابیم آنکه منافع مالی سازمان مورد تهدید واقع شود .
پایان نامه ای که هم اکنون پیش روی شماست حاصل تلاش اینجانب برای بررسی مقدمات علم رباتیک می باشد .هدف این پژوهش مطالعة موتورهای پله ایtepping Motor) ودرگاه موازی کامپیوتر( Parallel Port ) ومیکروکنترلرها(AVR) می باشد .
در تهیة این پایان نامه سعی شده تا به موضوعات مورد بررسی بطور جامع و بصورت کاربردی پرداخته شود و از منابع اطلاعاتی معتبر استفاده شود .امید است این مجموعه بتواند در جهت آشنایی و راهنمایی دوستان دیگر که گام های بلند تر دیگری در این زمینه بر خواهند داشت، مفید واقع شود.
ربات کلش با قابلیت نصب روی تمام گوشی ها
اختصاصی از کوشا فایل ربات کلش با قابلیت نصب روی تمام گوشی ها دانلود با لینک مستقیم و پرسرعت .
...