کوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهکوشا فایل
کوشا فایل بانک فایل ایران ، دانلود فایل و پروژهدانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator
اختصاصی از کوشا فایل دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator دانلود با لینک مستقیم و پرسرعت .

همانطور که در مطالب قبلی نیز اشاره نمودیم، CNC مخفف عبارت Computer Numerical Control می باشد. در ایران این ماشین ها CNC نامیده می شوند که اصطلاح فارسی آن ماشین ها و یا دستگاه های کنترل عددی می باشد.
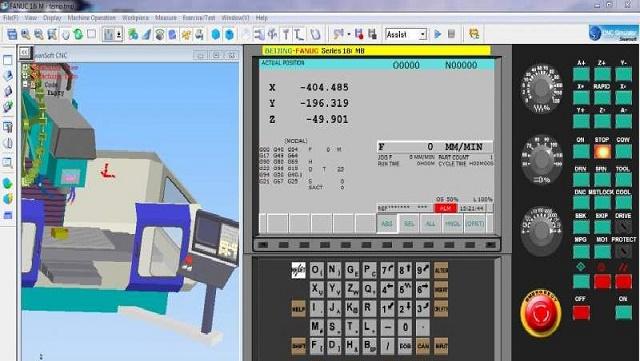
نرم افزار Nanjing Swansoft CNC Simulator، جهت شبیه سازی (Simulation) دستگاه های CNC (اعم از تراش و فرز سی ان سی) و همچنین تست نمودن جی کدهای نوشته شده به کار می رود

نرم افزار Nanjing Swansoft CNC Simulator، یکی از شبیهسازهای رایج و مورد استفاده متخصصین CAD/CAM بوده و دارای قابلیت های زیر می باشد:
- کارکردن بسیار ساده و آسان با این نرم افزار
- شبیه سازی کامل دستگاه تراش و فرز CNC
- توانایی برنامه نویسی تراش و فرز CNC
- تنظیم و نصب قطعه کار
- توانایی انتخاب ابزار و اشکال زدایی از ابزار فراخوانی شده
- تعریف نقطه صفر قطعه کار (Zero Point)
- رفرنس کردن دستگاه (Machine References)
- مشاهده و اندازه گیری قطعه کار ماشینکاری شده با ابزارهای لبهیاب، کولیس، میکرومتر و...
- قابلیت ضبط و پخش مراحل ماشینکاری
- ماشینکاری قطعه کار با اثر مایع خنک کننده
- امکان نمایش قطعهکار از زوایای مختلف به شکل همزمان هنگام شبیهسازی
- قابلیت استفاده در شبکه و...
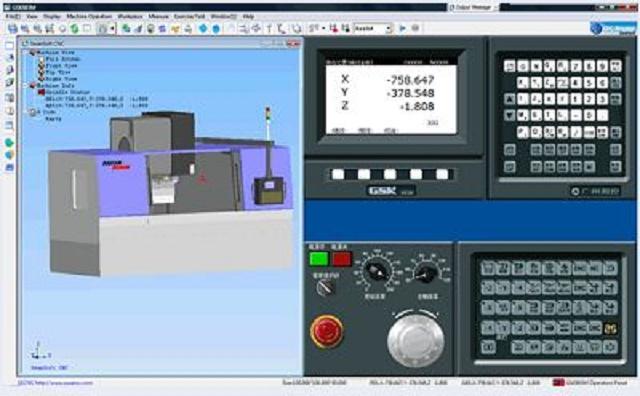
در نرم افزار Nanjing Swansoft CNC Simulator ابتدا با انتخاب سیستم کنترلر مورد نظر و همچنین دادن G Codeهای مورد انطباق با دستگاه عمل شبیه سازی کامل برای دستگاههای CNC انجام می شود.
نرم افزار Nanjing Swansoft CNC Simulator، برنامه ای کامل از انواع کنترلرهای موجود در بازارهای جهانی مانند فانوک، زیمنس، هاس و... می باشد. در این نرم افزار کاربر سی ان سی قادر خواهد بود بلوک خام قطعه کار را تعریف نموده و نوع ابزارهای مورد نیاز را نیز وارد نماید و به کمک برنامه نویسی (G کد) ماشین کاری قطعه را در کامپیوتر شبیه سازی نماید. در واقع با این نرم افزار یک ماشین فرز یا تراش CNC برای خود خواهید داشت.
*** لازم به ذکر است که علاوه بر فایل نصب نرم افزار شبیه ساز Nanjing Swansoft CNC Simulator، جزوه آموزشی برنامه نویسی کنترلر فانوک به زبان فارسی نیز جهت دانلود قرار داده شده است.
جهت خرید و دانلود نرم افزار شبیه ساز 3 بعدی دستگاه های سی ان سی Nanjing Swansoft CNC Simulator به مبلغ استثنایی فقط 4000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر محصولات مشابه و فروشگاه ها مقایسه نمایید!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.
دانلود پایان نامه بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی
اختصاصی از کوشا فایل دانلود پایان نامه بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی دانلود با لینک مستقیم و پرسرعت .

بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی
لینک پرداخت و دانلود *پایین مطلب*
فرمت فایل:Word (قابل ویرایش و آماده پرینت)
تعداد صفحه:158
فهرست مطالب :
چکیده ۲
فصل اول : تئوری نور ساختار یافته و کاربردهای بینایی سه بعدی
۱-۱- مقدمه ۱۷
۱-۲- روشهای غیر فعال بینایی سه بعدی ۱۸
۱-۲-۱- روش استریوفتوگرامتری ۱۸
۱-۳- روشهای فعال بینایی سه بعدی ۱۹
۱-۳-۱- بکار گیری سنسور تماسی دربینایی سه بعدی ۲۱
۱-۳-۲- بکار گیری سنسور غیر تماسی دربینایی سه بعدی ۲۲
۱-۳-۲-۱- روش ارسال امواج ۲۲
۱-۳-۲-۲- روش های انعکاسی ۲۳
۱-۳-۲-۲-۱- رهیافتهای غیر اپتیکی در روشهای انعکاسی ۲۳
۱-۳-۲-۲-۲- رهیافتهای اپتیکی در روشهای انعکاسی ۲۳
۱-۳-۲-۲-۲-۱ رادار تصویر برداری۲۴
۱-۳-۲-۲-۲-۲- روشهای اینترفرومتریک ۲۶
۱-۳-۲-۲-۲-۳- استخراج عمق از طریق تمرکز بر روش فعال ۲۷
۱-۳-۲-۲-۲-۴- استریوی فعال ۲۸
۱-۳-۲-۲-۲-۵- راستراستریوفتوگرامتری ۲۸
۱-۳-۲-۲-۲-۶- سیستم مجتمع تصویر برداری ۲۹
۱-۳-۲-۲-۲-۷- تکنیک نور ساختار یافته ۳۰
۱-۴- مقایسه روشها وتکنیکها و کاربردهای آنها ۳۲
۱-۵- نتیجه گیری۳۵
فصل دوم : روشهای مختلف کدینگ الگو
۲-۱- مقدمه ۳۷
۲-۲- روشهای طبقه بندی کدینگ الگوهای نوری ۳۸
۲-۲-۱- الگوهای نوری از دیدگاه درجات رنگی ۳۹
۲-۲-۲- الگوهای نوری از دیدگاه منطق کدینگ ۴۰
۲-۲-۲-۱- روشهای مبتنی بر الگوهای چند زمانه (کدینگ زمانی) ۴۲
۲-۲-۲-۱-۱- کدینگهای باینری ۴۲
۲-۲-۲-۱-۲- کدینگ با استفاده از مفهوم n-ary 44
2-2-2-1-3- کدینگ با استفاده از مفهوم انتقال مکانی ۴۵
۲-۲-۲-۱-۴- کدینگ با استفاده از همسایگی ۴۶
۲-۲-۲-۲- روشهای مبتنی بر همسایگیهای مکانی(کدینگ مکانی) ۴۸
۲-۲-۲-۲-۱- کدینگهای غیر متعارف (ابتکاری) ۴۸
۲-۲-۲-۲-۲- کدینگ بر اساس دنباله De_Bruijn 50
2-2-2-2-3- کدینگ بر اساس منطق M-Arrays52
2-2-2-3- کدینگ مستقیم ۵۴
۲-۳- نتیجه گیری۵۵
فصل سوم :پیاده سازی کدینگ و پردازش تصویر
۳-۱- مقدمه ۵۷
۳-۲- تولید کلمه های رمز با استفاده از دنباله De_Bruijn 59
3-3- تابش الگو و عکسبرداری ۶۵
۳-۴- پردازش تصویر ۶۶
۳-۴-۱- دوسطحی سازی ۶۸
۳-۴-۲- تشخیص لبه ها و اسکلت بندی ۷۰
۳-۴-۳- نازک سازی ۷۴
۳-۴-۴ نقاط تقاطع ۷۵
۳-۴-۵- شناسایی خطوط ۷۸
۳-۵- نتیجه گیری ۸۲
فصل چهارم :
شناسایی رنگ و حل مسئله تطابق و بازسازی سه بعدی
۴-۱- مقدمه ۸۴
۴-۲- شبکه عصبی و شناسایی رنگ ۸۶
۴-۲-۱- مسئله تغییر رنگ ۸۷
۴-۳- طراحی شبکه عصبی ۸۸
۴-۴- مسئله تطابق۹۳
۴-۵- بازسازی سه بعدی ۹۹
۴-۶- بررسی خطاهای موجود ۱۰۳
۴-۶-۱- تغییر رنگ و خروجی غیر قطعی شبکه ۱۰۳
۴-۶-۲- ناپیوستگی های تصویر رنگی ۱۰۳
۴-۶-۳-خطای همپوشانی ۱۰۴
۴-۷- نتیجه گیری۱۰۵
فصل پنجم : نتیجه گیری و پیشنهادات
۵-۱ مقدمه ۱۰۷
۵-۲- انتخاب روش و پیاده سازی ۱۰۸
۵-۳- پیشنهادات ۱۰۸
پیوست الف : نرم افزار تهیه شده ۱۱۱
پیوست ب : مثلث بندی ۱۲۲
مراجع ۱۳۰
چکیده :
هدف از این پروژه استخراج پروفایل سه بعدی اجسام به استفاده از روش نور ساختار یافته ااست.
با توجه به بررسی های انجام شده نور ساختار یافته دارای مزایای ویژه ای می باشد . برای مثال سیستمهای مبتنی بر اُپتیک معمولا دارای هزینه پایین تری هستند . همچنین سیستم های بینایی استرﻳو ( شامل دو دوربین ) یا استریو فتو گرامتری برای سنجش برد کوتاه دارای کاربردهای زیادی می باشد . اما این سیستم در اندازه گیری فواصل کوتاه دارای نواقص و مشکلات مربوط به خود است . این مطلب باعث شده روشهای نور ساختار یافته در فواصل کوتاه بیشتر مورد توجه قرار گیرد . وجود کدینگ در نور ساختار یافته و کاربرد آن در تناظر یابی باعث بالاتر رفتن ضریب اطمینان می شود . برای راه اندازی این سیستم نیاز به یک پروژکتور LCD و یک دوربین تصویر برداری است که با توجه به الگو از آن می توان برای بازسازی اجسام متحرک نیز استفاده کرد . در این میان نقش اساسی را الگوریتم و نرم افزار نوشته شده برای پردازش ها و اندازه گیریها برعهده دارد . مراحل کاری این سیستم در فلوچارت به صورت کلی آورده شده است .
این سیستم دارای کاربردهای فراوانی در استخراج مدل سه بعدی اجسامی از قبیل آثار هنری ، ایجاد مدل کامپیوتری از عروسکها و مجسمه ها در کاربردهای انیمیشن سازی دارد . همچنین دارای کاربردهای قابل تطبیق، در سیستم های پزشکی و برخی مسائل صنعتی مانند مهندسی معکوس نیز می باشد .
هدف از این پروژه استخراج پروفایل سه بعدی اجسام به استفاده از روش نور ساختار یافته ااست.
با توجه به بررسی های انجام شده نور ساختار یافته دارای مزایای ویژه ای می باشد . برای مثال سیستمهای مبتنی بر اُپتیک معمولا دارای هزینه پایین تری هستند . همچنین سیستم های بینایی استرﻳو ( شامل دو دوربین ) یا استریو فتو گرامتری برای سنجش برد کوتاه دارای کاربردهای زیادی می باشد . اما این سیستم در اندازه گیری فواصل کوتاه دارای نواقص و مشکلات مربوط به خود است . این مطلب باعث شده روشهای نور ساختار یافته در فواصل کوتاه بیشتر مورد توجه قرار گیرد . وجود کدینگ در نور ساختار یافته و کاربرد آن در تناظر یابی باعث بالاتر رفتن ضریب اطمینان می شود . برای راه اندازی این سیستم نیاز به یک پروژکتور LCD و یک دوربین تصویر برداری است که با توجه به الگو از آن می توان برای بازسازی اجسام متحرک نیز استفاده کرد . در این میان نقش اساسی را الگوریتم و نرم افزار نوشته شده برای پردازش ها و اندازه گیریها برعهده دارد . مراحل کاری این سیستم در فلوچارت به صورت کلی آورده شده است .
این سیستم دارای کاربردهای فراوانی در استخراج مدل سه بعدی اجسامی از قبیل آثار هنری ، ایجاد مدل کامپیوتری از عروسکها و مجسمه ها در کاربردهای انیمیشن سازی دارد . همچنین دارای کاربردهای قابل تطبیق، در سیستم های پزشکی و برخی مسائل صنعتی مانند مهندسی معکوس نیز می باشد .
روشهای مختلفی برای استخراج پروفایل سه بعدی اجسام وجود دارند . این روشها را می توان از لحاظ نحوه کار به دو دسته کلی غیرفعال و فعال تقسیم بندی کرد .بر خلاف روشهای غیرفعال که بر هم کنش و تغییری روی شکل انجام نمی دهند ، روشهای فعال یا با موضوع ارتباط تماسی بر قرار می کنند و یا بعضی از انواع خاص نور را روی آن تصویر می کنند ( روش نور ساختار یافته).
بینایی سه بعدی همواره از موضوعات اساسی و مهم در بینایی ماشین بوده است . این اهمیت به دلیل کاربردهای بسیار مهم و متنوع آن است . کاربردهای مختلف این شاخه بینایی ماشین در اندازه گیری ابعاد یک جسم ، مهندسی معکوس ، کنترل کیفیت محصولات خروجی کارخانه ، شناسایی اشیاء[1] ، تهیه نقشه سه بعدی ، انیمیشن کامپیوتری ، کاربردهای پزشکی و بسیاری کاربردهای دیگر است .
با توجه به کاربردهای مختلف اندازه گیری سه بعدی ، همواره سیستمهای مختلفی با توجه به نیازهای گوناگون پیاده سازی شده اند . اما در این میان استریو فتو گرامتری از مهمترین و عمده ترین روشها بوده است که در بسیاری از اوقات در بینایی سه بعدی به کار گرفته شده است . اما در دهه های اخیر استفاده از نور ساختار یافته رواج پیدا کرده است . در این فصل به مروری بر روشهای اسکن سه بعدی و کاربردها و اهمیت بازسازی شکل سه بعدی جسم می پردازیم .
1-2-روشهای غیر فعال استخرج پروفایل سه بعدی
استفاده از روشهای غیر فعال در بینایی سه بعدی از مدتها بر روی چندین تصویر دیجیتالی معمول بوده است . از جمله این روشها می توان به مثلث بندی دوتایی برای تصاویر جفت ، سایه اندازی[2] و حرکت یا بافت[3] اشاره کرد .
در ادامه روش بینایی استریو که یکی از پرکاربردترین روشهای غیر فعال است ، توضیح داده می شود . سپس به تشریح روشهای فعال می پردازیم .
1-2-1-روش استریو فتوگرامتری
درسیستم استریوفتوگرامتری یا بینایی سه بعدی از دو دوربین برای بدست آوردن اطلاعات سه بعدی استفاده می شود . این سیستم شبیه بینایی دو چشمی است که در بینایی انسان استفاده می شود . این سیستم در شکل 1-1 نشان داده شده است . مهمترین مسئله در این روش ، مسئله تطابق است . در این فرایند برای اطمینان از تمرکز دو دوربین در یک نقطه بایستی بین دو دوربین تطابق پیدا کرد .این کار را می توان با استفاده از اطلاعات موجود در باره موضوع و یا استفاده از نقاط مبنا نظیر دیودهای منتشر کننده نور در میدان دوربینها انجام داد . برای مثال فرض کنید دو دوربین بر روی نقطه P تمرکز کرده با شند ، با داشتن فاصله بین دو دوربین D و فاصله کانونی دوربینها می توان L1 و L2 را محاسبه کرد [4].
و...
دانلود پایان نامه اولتراسوند سه بعدی
اختصاصی از کوشا فایل دانلود پایان نامه اولتراسوند سه بعدی دانلود با لینک مستقیم و پرسرعت .

اولتــراسوند سه بعـدی
لینک پرداخت و دانلود *پایین مطلب*
فرمت فایل:Word (قابل ویرایش و آماده پرینت)
تعداد صفحه:151
فهرست مطالب :
چکیده-.................................... 5
مقدمه-.................................... 6
فصل اول – معرفی اولتراسوند 3D و محدویت های 2 – 3D UltraSound 7
فصل دوم- تکنیک های دریافت و اسکن.......... 11
1-2- دریافت دستی ......................... 12
2-2- موقعیت یاب آکوستیک................... 13
3-2- موقعیت یاب بازوی مفصل دار............ 14
4-2- سنسور میدان مغناطیسی................. 14
5-2- موقعیت یاب های مکانیکی............... 15
1-5-2- اسکن خطی...................... 17
2-5-2- اسکنFan....................... 18
3-5-2- اسکن چرخشی.................... 19
فصل سوم- بازسازی تصویر 3-3D................ 21
1-3- آرایه های دو بعدی.................... 23
2-3- تکنیک دید برپایة سطح................. 25
3-3- دید چند صفحه ای ..................... 26
4-3- تکنیک بر پایةحجم..................... 29
فصل چهارم – کاربردهای -3D UltraSound ......... 31
1-4- تصویر برداری عروق................... 32
2-4- بافت های نرم........................ 39
3-4- کاردیولوژی.......................... 41
4-4- ارزیابی حجم ران نوزاد نرمال......... 42
5-4- خلاصه ای از مزایای کلینیکی اسکن اولتراسوند3D و 4D 43
فصل پنجم - تحقق سیستم اولتراسوند 3D ..... 50
1-5- آنژیوگرام اولتراسوند 3D از تصاویر نقش شدة جریان رنگی ..................................... 51
2-5- ساخت تصویر اولتراسوند 3D از سرخرگ کاروتید. 58
3-5- تولید کامپیوتری تصاویر اولتراسوند 3D از سرخرگ کاروتید .................................. 60
فصل ششم- بهبود تصویر 3-D UltraSound........... 72
1-6- پنجرة دی کانوولوشن 3-D.............. 73
2-6- دی کانوولوشن در راستای ارتفاع ...... 84
3-6- آنالیز اعوجاج هندسی و واریانس آماری در طول،سطح و حجم تصویر اولتراسوند
اسکن شده خطی 3-D........................ 100
فصل هفتم - مشاهده realtime داده اولتراسونیک 3D توسط یک pc استاندارد ............... 102
فصل هشتم – معرفی سیستم MUSTPAC در پزشکی از راه دور 3-D UltraSound 115
فصل نهم- آینده 3-D UltraSound......................... 129
نتیجه گیری ....................................... 131
فهرست مراجع ...................................... 135
چکیده :
هدف در تصویر بردارری 3D مشاهدة ساختار آناتومی به صورت واقعی می باشد. که این امر توسط سیستم های تصویر برداری 2D، نظیر X-ray ,CT, MR و . . . امکان پذیر نبوده است. در این سمینار سعی شده است که این تکنیک که به طور خاص مربوط به تصاویر اولتراسوند می باشد معرفی گردد. لذا تکنیک های دریافت و اسکن تصاویر و سپس بازسازی تصویر 3D مورد بحث قرار خواهند گرفت. سپس جهت ترغیب به ادامه بحث ها مروری بر کار بردهای وسیع این روش تصویر برداری شده است.
متعاقباً تحقق سیستم اولتراسوند 3D آنژیوگرام 3D و ساخت تصاویر 3D کاروتید شرح داده خواهد شد تا نمونه ای عملی از این سیستم معرفی گردد. سپس در تکمیل بخشهای قبلی روشهایی که درمقالات جهت بهبود تصاویر اولتراسوند 3D ارائه شده است، مورد بررسی قرار می گیرد. و در ادامه مشاهدة زمان واقعی1 اولتراسوند 3D توسط کامپیوتر، که روشی جدید می باشد مورد بحث قرار می گیرد وسپس کاربرد اولتراسوند 3D در پزشکی از راه دور 2 و در نهایت آیندة سیستم اولتراسوند 3D آورده شده اند.
امید است که این سمینار زمینة تحقیق را برای علاقمندان به روشهای تصویر برداری و بخصوص تصویر برداری 3D فراهم سازد و دیگر دانشجویان را با این سیستم تصویر برداری که امروزه بسرعت در حال پیشرفت می باشد و به سمت کاربرد روتین در پزشکی هدایت می شود، آشنا نموده باشد.
در 100 سال گذشته تصویر برداری X- ray راهی برای مشاهدة بدن انسان بوده است که توسط آن سایه ای دو بعدی از ساختارهای سه بعدی تولید و روی آشکار ساز دو بعدی مثل فیلم ثبت می گردید.در این روش تمام اطلاعات سه بعدی از بین می رفتند.در 70 سال اول کشف X-ray تمام تلاشها بر این بوده است که تکنیک های تصویر برداری توسعه یابد و اطلاعات سه بعدی درون بدن در تصویر ثبت شده حضور یابد.در 1970 ،CT تولید شد و انقلابی در تشخیص رادیولوژی ایجاد نمود برای اولین بار اطلاعات سه بعدی در تصاویر ثبت شده حاضر گشت،و به صورت سری اسلایدهایی با نقش هایی از بدن(یعنی تصاویر 2-D ) در اختیار پزشکان قرار گرفت.بعلاوه،برای اولین بار در رادیولوژی کامپیوتر در پردازش و نمایش تصویر به صورت متمرکز استفاده شد.اطلاعات 3-D کاربردهای زیادی در تشخیص رادیولوژی دارد.
تاریخچة تصویر برداری اولتراسوند به گذشته برمی گردد.با دنبال کردن کارReid,Wild در دهة 1950 از پیش گامان این رشته هستند کاربرد پزشکی اولتراسوند به آرامی پیشرفت یافت و از سیستم های A-Mode به سیستم هایی تبدیل شد که تصاویر مقطعی شده read-time را از جریان خون و آناتومی ایجاد می نمود.کیفیت تصاویر اولتراسوند جهت مدیریت بهتر تعداد زیاد بیماری ها و تشخیص بهبود یافت.اگر چه تصویربرداری اولتراسوند به علت این که هنوز پتانسیل کامل آن درک نشده است، لطمه دیده است.
توسعة تصویربرداری اولتراسوند 3-D راهی برای نشان دادن معایب تصویربرداری اولتراسوند مرسوم می باشد.روش هایی در توسعه اولتراسوند 3-D مثل 3-D B-Mode، داپلر رنگی و سیستم های داپلر توان حاصل شده است.
یکی از معایب تصویربرداری اولتراسوند 2-D وابستگی آن به تجربه و دانسته های تشخیص دهنده می باشد تا مبدل اولتراسوند را هدایت کند تا به طور ذهنی تصویر دوبعدی به سه بعدی تبدیل گرددو تشخیص یا اجرا را به یک روند تداخلی تبدیل نماید.این مشکل مقدمتاً نتیجه بکارگیری تکنیک تصویربرداری 2-D اولتراسوند که به صورت فضایی قابل انعطاف می باشد،برای مشاهده ساختار آناتومی می باشد.
پروسه های درمانی که توسط اولتراسوند هدایت می شوند دچار زیان خواهند شد،زیرا کمی کردن و مونیتو تغییرات کوچک در طول پروسه یا در طول یک دوره از زمان با محدودیت های 2-D مرسوم محدود شده است.و این عمل و اتلاف وقت می باشد و کافی نیست و نیز ممکن است به تصمیم نادرست در خصوص تشخیص،مرحله بندی و در حین عمل جراحی گردد.بعلاوه قرار دادن صفحه تصویر در اولتراسوند 2-D نازک در روی ارگان و تولید دوباره محل تصویر ویژه در زمان دیگر مشکل می باشد.این امرتصاویر D -2 اولتراسوند را برای مطالعات پس از عمل جراحی1 یک تصویربرداری ضعیف تلقی می کند. همچنین، آناتومی بیمار و مسیر هدف گاهی زاویه تصویر را محدود می کند و صفحه تصویر بهینه را برای تشخیص غیر قابل دسترس می سازد.
هدف تصویربرداری اولتراسوند 3-D فائق آمدن بر این محدودیت ها می باشد تا آناتومی بصورت 3-D جهت تشخیص مشاهده گردد و تغییر پذیری تکنیک های مرسوم را کاهش دهد.تصویربرداری اولتراسوند پزشکی به طور مقطعی می باشد بنابراین اطلاعات لازم برای مشاهده سه بعدی را فراهم می سازد.اگر چه،برخلاف تصویربرداری MR و CT،که تصاویر معمولاًدر یک نرخ آهسته از اسلایس های موازی پشت سرهم دریافت می شوند،اولتراسوند تصاویر مقطعی در یک نرخ بالا (16-10 تصویر در ثانیه)را باایجاد می کند و جایگذاری تصاویر قابل انعطاف می باشد.زیرا لزوماًنیازی به دریافت صفحات بصورت پشت سرهم ندارد.علاوه بر مشکلات بی نظیری که فیزیک تصویربرداری اولتراسوند باآن روبرو می باشد(لکه1، سایه2، اعوجاج3) نرخ بالای دریافت تصویر و انعطاف پذیری تکنیک مرسوم بر مشکلات غلبه کرده و همچنین باعث به گسترش اولتراسوند از تصاویر 2-D به3-D و4-D شده است.
مقالاتی که ابزار پزشکی تصویربرداری اولتراسوند 3-D را شرح می دهند در خصوص بکارگیری آن در رادیولوژی و echocardiology به چاپ رسیده است.این مقالات نشان می دهند که سیستم های بسیاری جهت تولید تصاویر 3-D اولتراسوند ایجاد شده اند که به سادگی توسط 2 بلوک نشان داده شده در شکل 1 قابل شرح هستند.[1] بلوک ابتدایی مربوط به تکنیک دریافت های متعددی می شود که به کار گرفته شده اند.بلوک دوم مربوط به ثبت تصاویر اولتراسوند قبل از بازسازی می باشد.بلوک سوم بازسازی تصاویر 3-D از تصاویر 2-D ثبت شده است.بلوک انتهایی تکنیک مشاهده برای نمایش تصویر 3-D را مهیا می سازد.تمام بلوک ها در فصول بعدی توصیف می گردند.
شکل1- شماتیک بلوک دیافراگم که چهارمرحله از سیستم تصویر برداری اولتراسوند 3-D را نشان می دهد. مرحله اول مربوط به سخت افزار دریافت در تصویر برداری که برای هدایت مبدل به کار گرفته می شود؛ دوم، روندی که توسط آن تصاویر اولتراسوند 2-D دریافت می شوند؛ سوم، تکنیک های بازسازی به کارگرفته برای دستیابی به تصویر3D: و چهارم، تکنیک نمایش به کار گرفته شده برای مشاهده تصویر3 –D ، می باشند.
و...
توصیف آشکارسازهای نیمه هادی سه بعدی نوترونهای حرارتی
اختصاصی از کوشا فایل توصیف آشکارسازهای نیمه هادی سه بعدی نوترونهای حرارتی دانلود با لینک مستقیم و پرسرعت .

مقاله با عنوان توصیف آشکارسازهای نیمه هادی سه بعدی نوترونهای حرارتی در فرمت ورد و شامل مطالب زیر می باشد:
«توصیف آشکار سازهای نیمه هادی سه بعدی نوترونهای حرارتی»
مقدمه و اهداف
آشکار سازی آشکارسازهای نوترونی صفحه ای
بهره آشکارسازی آشکارسازهای دارای حفره هرمی
بهره آشکارسازی آشکارسازهای3D نوترون
آزمایشهای ساختارهای سه بعدی
توصیف نمونه ها و اندازه گیریها
نتایج اندازه گیری
بحث و بررسی
بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی ( 3D VISON USING STRUCTURED LIGHT WITH COLOR PATTERN)
اختصاصی از کوشا فایل بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی ( 3D VISON USING STRUCTURED LIGHT WITH COLOR PATTERN) دانلود با لینک مستقیم و پرسرعت .

بینایی سه بعدی با استفاده از نور ساختار یافته با الگوی رنگی
3D VISON USING STRUCTURED LIGHT WITH COLOR PATTERN
135 صفحه در قالب word
چکیده :
هدف از این پروژه استخراج پروفایل سه بعدی اجسام به استفاده از روش نور ساختار یافته ااست.
با توجه به بررسی های انجام شده نور ساختار یافته دارای مزایای ویژه ای می باشد . برای مثال سیستمهای مبتنی بر اُپتیک معمولا دارای هزینه پایین تری هستند . همچنین سیستم های بینایی استرﻳو ( شامل دو دوربین ) یا استریو فتو گرامتری برای سنجش برد کوتاه دارای کاربردهای زیادی می باشد . اما این سیستم در اندازه گیری فواصل کوتاه دارای نواقص و مشکلات مربوط به خود است . این مطلب باعث شده روشهای نور ساختار یافته در فواصل کوتاه بیشتر مورد توجه قرار گیرد . وجود کدینگ در نور ساختار یافته و کاربرد آن در تناظر یابی باعث بالاتر رفتن ضریب اطمینان می شود . برای راه اندازی این سیستم نیاز به یک پروژکتور LCD و یک دوربین تصویر برداری است که با توجه به الگو از آن می توان برای بازسازی اجسام متحرک نیز استفاده کرد . در این میان نقش اساسی را الگوریتم و نرم افزار نوشته شده برای پردازش ها و اندازه گیریها برعهده دارد . مراحل کاری این سیستم در فلوچارت به صورت کلی آورده شده است .
این سیستم دارای کاربردهای فراوانی در استخراج مدل سه بعدی اجسامی از قبیل آثار هنری ، ایجاد مدل کامپیوتری از عروسکها و مجسمه ها در کاربردهای انیمیشن سازی دارد . همچنین دارای کاربردهای قابل تطبیق، در سیستم های پزشکی و برخی مسائل صنعتی مانند مهندسی معکوس نیز می باشد .
فهرست مطالب:
چکیده 2
فصل اول : تئوری نور ساختار یافته و کاربردهای بینایی سه بعدی
1-1- مقدمه 17
1-2- روشهای غیر فعال بینایی سه بعدی 18
1-2-1- روش استریوفتوگرامتری 18
1-3- روشهای فعال بینایی سه بعدی 19
1-3-1- بکار گیری سنسور تماسی دربینایی سه بعدی 21
1-3-2- بکار گیری سنسور غیر تماسی دربینایی سه بعدی 22
1-3-2-1- روش ارسال امواج 22
1-3-2-2- روش های انعکاسی 23
1-3-2-2-1- رهیافتهای غیر اپتیکی در روشهای انعکاسی 23
1-3-2-2-2- رهیافتهای اپتیکی در روشهای انعکاسی 23
1-3-2-2-2-1 رادار تصویر برداری 24
1-3-2-2-2-2- روشهای اینترفرومتریک 26
1-3-2-2-2-3- استخراج عمق از طریق تمرکز بر روش فعال 27
1-3-2-2-2-4- استریوی فعال 28
1-3-2-2-2-5- راستراستریوفتوگرامتری 28
1-3-2-2-2-6- سیستم مجتمع تصویر برداری 29
1-3-2-2-2-7- تکنیک نور ساختار یافته 30
1-4- مقایسه روشها وتکنیکها و کاربردهای آنها 32
1-5- نتیجه گیری 35
فصل دوم : روشهای مختلف کدینگ الگو
2-1- مقدمه 37
2-2- روشهای طبقه بندی کدینگ الگوهای نوری 38
2-2-1- الگوهای نوری از دیدگاه درجات رنگی 39
2-2-2- الگوهای نوری از دیدگاه منطق کدینگ 40
2-2-2-1- روشهای مبتنی بر الگوهای چند زمانه (کدینگ زمانی) 42
2-2-2-1-1- کدینگهای باینری 42
2-2-2-1-2- کدینگ با استفاده از مفهوم n-ary 44
2-2-2-1-3- کدینگ با استفاده از مفهوم انتقال مکانی 45
2-2-2-1-4- کدینگ با استفاده از همسایگی 46
2-2-2-2- روشهای مبتنی بر همسایگیهای مکانی(کدینگ مکانی) 48
2-2-2-2-1- کدینگهای غیر متعارف (ابتکاری) 48
2-2-2-2-2- کدینگ بر اساس دنباله De_Bruijn[1] 50
2-2-2-2-3- کدینگ بر اساس منطق M-Arrays 52
2-2-2-3- کدینگ مستقیم 54
2-3- نتیجه گیری 55
فصل سوم :پیاده سازی کدینگ و پردازش تصویر
3-1- مقدمه 57
3-2- تولید کلمه های رمز با استفاده از دنباله De_Bruijn 59
3-3- تابش الگو و عکسبرداری 65
3-4- پردازش تصویر 66
3-4-1- دوسطحی سازی 68
3-4-2- تشخیص لبه ها و اسکلت بندی 70
3-4-3- نازک سازی 74
3-4-4 نقاط تقاطع 75
3-4-5- شناسایی خطوط 78
3-5- نتیجه گیری 82
فصل چهارم :
شناسایی رنگ و حل مسئله تطابق و بازسازی سه بعدی
4-1- مقدمه 84
4-2- شبکه عصبی و شناسایی رنگ 86
4-2-1- مسئله تغییر رنگ 87
4-3- طراحی شبکه عصبی 88
4-4- مسئله تطابق 93
4-5- بازسازی سه بعدی 99
4-6- بررسی خطاهای موجود 103
4-6-1- تغییر رنگ و خروجی غیر قطعی شبکه 103
4-6-2- ناپیوستگی های تصویر رنگی 103
4-6-3-خطای همپوشانی 104
4-7- نتیجه گیری 105
فصل پنجم : نتیجه گیری و پیشنهادات
5-1 مقدمه 107
5-2- انتخاب روش و پیاده سازی 108
5-3- پیشنهادات 108
پیوست الف : نرم افزار تهیه شده 111
پیوست ب : مثلث بندی 122
مراجع 130
مقدمه :
نظر به گستردگی روز افزون استفاده از سیستم های هوشمند لزوم بکار گیری سیستم های بینایی اتوماتیک و یا نیمه اتوماتیک به منظور بدست آوردن ابعاد جسم بر کسی پوشیده نیست . در همین راستا در صنایع نیز در ایستگاههای بازرسی و کنترل کیفیت جهت بررسی دقیقتر میزان تطابق قطعه ی درحال تولید با قطعه مورد نظر ، از سیستم های بینایی استفاده می شود . بدین وسیله علاوه بر مشخص شدن مورد خطا ، محل دقیق آن و میزان خرابی نیز مشخص می شود .
از جمله موارد کاربرد دیگر سیستم بینایی می توان به علوم نظامی ، پزشکی ، باستانشناسی ، راه و ساختمان و زمین شناسی و هدایت ربات اشاره کرد که روز به روز استفاده از سیستم های بینایی در آنها افزایش می یابد . سیستم های بینایی معمولی ، تنها به گرفتن یک تصویر دو بعدی از جسم اکتفا می کنند و قادر به تشخیص فاصله و یا ارتفاع و عمق نیستند . به همین دلیل و برای داشتن اطلاعات بیشتر از جسم ، محققان تلاش خود را بر روی بدست آوردن اطلاعات از بعد سوم (محور Z) متمرکز کردند .
در راستای این تلاشها رهیافتهای متفاوتی جهت اسکن سه بعدی یک جسم ارائه شد . در این میان اسکنرهای تماسی مبتنی بر سنسورهای تماسی مکانیکی و اسکنرهای غیر تماسی مبتنی بر تکنولژی اپتیکی از جمله راه کارهایی هستند که محققان در پیش رو دارند . و در این میان راه کارهای اپتیکی به دلیل انعطاف پذیر بودن و هزینه قابل قبول ترجیح داده می شوند . ضمن اینکه در خیلی از موارد از دقت و قدرت بالاتری در مقایسه با تکنولژی تماسی برخوردار هستند .
در تحقیق انجام شده پس از بررسی انواع روشهای اپتیکی برای استخراج پروفایل سه بعدی ، یک سیستم نوری بر مبنای نور ساختاریافته کدینگ شده پس از بررسی روشهای کار شده در این زمینه ، پیاده سازی می شود .
فصل اول به بررسی روشهای متفاوت استخراج مدل سه بعدی اشیاء می پردازد. علاوه بر آن کاربردهای مختلف بینایی سه بعدی ارائه می شود . در فصل دوم تکنیکهای مختلف کدینگ الگو در نور ساختاریافته بررسی می شود . در فصل سوم که آغازی برای پیاده سازی است با طراحی یک نوع کدینگ به طراحی یک الگو پرداخته می شود و پردازشهای لازم اولیه در تصاویر برای کشف رمزها توضیح داده می شوند . فصل چهارم با توضیح استفاده از شبکه عصبی برای تعیین کد رنگهای بدست آمده در ادامه به حل مسئله تطابق می پردازد و در نهایت یک بازسازی سه بعدی اولیه از جسم ارائه می دهد . در نهایت در فصل پنجم به جمع بندی فصول گذشته پرداخته شده و پیشنهاداتی برای ادامه کار داده خواهند شد . در صفحه بعدی فلوچارتی از مراحل کلی کار آورده شده که به طور کلی نمایانگر مراحل کاری می باشد .
ممکن است هنگام انتقال از فایل ورد به داخل سایت بعضی متون به هم بریزد یا بعضی نمادها و اشکال درج نشود ولی در فایل دانلودی همه چیز مرتب و کامل است
متن کامل را می توانید در ادامه دانلود نمائید
چون فقط تکه هایی از متن برای نمونه در این صفحه درج شده است ولی در فایل دانلودی متن کامل همراه با تمام ضمائم (پیوست ها) با فرمت ورد word که قابل ویرایش و کپی کردن می باشند موجود است